
Tutoriales, Tareas del grado de Tercero Básico
Circuito en Tinkercad de la conexión de un Servomotor.

Video tutorial para programar un servomotor
¿Qué es y cómo funciona un servomotor?

Un servomotor es un tipo especial de motor que permite controlar la posición del eje en un momento dado. Esta diseñado para moverse determinada cantidad de grados y luego mantenerse fijo en una posición.

Los motores DC como los que se muestran en la imagen tienen la particularidad de que giran sin detenerse. No son capaces de dar determinada cantidad de vueltas o detenerse en una posición fija. Solo giran y giran sin parar, hasta que se interrumpa el suministro de corriente. Esto hace que no sea posible utilizarlos para asuntos de robótica, ya que en este tipo de aplicaciones se necesita movimientos precisos y mantener posiciones fijas. Lo cierto es que este no es el único tipo de motor DC que existe.
Para la construcción de robots se utilizan motores paso a paso y/o servomotores. Estos se caracterizan por ser permitir un movimiento controlado y por entregar un mayor par de torsión (torque) que un motor DC común. Sobre este tema ya ha escrito el amigo Gustavo Circelli de forma indirecta en su post sobre el acelerómetro MMA7361. Sin embargo, he decidido escribir este post exclusivo sobre el tema. En este artículo daremos un vistazo a lo que son los servomotores, sus usos y principales características y haremos algunas pruebas experimentales sobre consumo de energía.
Definición de servomotor
Un servomotor (o servo) es un tipo especial de motor con características especiales de control de posición. Al hablar de un servomotor se hace referencia a un sistema compuesto por componentes electromecánicos y electrónicos.

El motor en el interior de un servomotor es un motor DC común y corriente. El eje del motor se acopla a una caja de engranajes similar a una transmisión. Esto se hace para potenciar el torque del motor y permitir mantener una posición fija cuando se requiera. De forma similar a un automóvil, a menor mayor velocidad, menor torque. El circuito electrónico es el encargado de manejar el movimiento y la posición del motor.

La presencia del sistema de engranajes como el que se muestra en la figura hace que cuando movemos el eje motor se sienta una inercia muy superior a la de un motor común y corriente. Observando las imágenes que hemos presentado nos podemos dar cuenta que un servo no es un motor como tal, sino un conjunto de partes (incluyendo un motor) que forman un sistema.
Tipos de servomotores
Existen servomotores para todo tipo de usos. En la industria, la robótica, en el interior de las impresoras, máquinas CNC, etc. Para los efectos de este post nos interesan los servomotores de modelismo, que son los utilizados en prototipos de robótica. No tomaremos en cuenta los servomotores del tipo industrial.

Servomotor de Tipo Industrial

Servomotor de modelismo
Los servomotores de modelismo operan a voltajes bajos en corriente directa, típicamente entre 4 y 6 voltios. Los servomotores industriales operan tanto en DC como en AC (monofásico o trifásico). Para mí es un poco difícil escribir sobre este tipo de temas debido a que nunca he tenido la oportunidad de trabajar con un servo industrial. Lo que sé sobre ellos es por lo que he leído o lo habré visto en algún video o seminario. Los servos de modelismo, en cambio, se pueden adquirir a muy bajo costo en Internet y son populares entre los usuarios de Arduino.
Se debe resaltar que, dentro de los diferentes tipos de servomotores, éstos se pueden clasificar según sus características de rotación.
- Servomotores de rango de giro limitado: son el tipo más común de servomotor. Permiten una rotación de 180 grados, por lo cual son incapaces de completar una vuelta completa.
- Servomotores de rotación continua: se caracterizan por ser capaces de girar 360 grados, es decir, una rotación completa. Su funcionamiento es similar al de un motor convencional, pero con las características propias de un servo. Esto quiere decir que podemos controlar su posición y velocidad de giro en un momento dado.
Los servomotores de rango de giro limitado se pueden adecuar para que funcionen como servomotores de rotación continua. Sin embargo, si requerimos un servo de 360 grados es mejor comprar uno que haya sido diseñado para este tipo de uso.
Funcionamiento de un servomotor
Los servomotores poseen tres cables, a diferencia de los motores comunes que sólo tienen dos. Estos tres cables casi siempre tienen los mismos colores, por lo que son fácilmente reconocibles.

Los colores dependerán del fabricante, pero difícilmente nos equivocaremos a la hora de reconocer los terminales del un servo. La necesidad de una señal de control para el funcionamiento de este tipo de motores hace que sea imposible utilizarlos sin un circuito de control adecuado. Esto se debe a que para que el circuito de control interno funcione, es necesaria una señal de control modulada. Para esto se utiliza modulación por ancho de pulsos, es decir, PWM.

El diagrama de bloque del servomotor representa de forma visual el servomotor como un sistema. El circuito electrónico es el encargado de recibir la señal PWM y traducirla en movimiento del Motor DC. El eje del motor DC está acoplado a un potenciómetro, el cual permite formar un divisor de voltaje. El voltaje en la salida del divisor varía en función de la posición del eje del motor DC.

De forma similar, cuando el eje del motor modifica la posición del potenciómetro, el voltaje en la terminal central varía. El potenciómetro permite que el circuito de control electrónico pueda retroalimentarse con la posición del motor en un momento dado. Esto, en Teoría de Control se conoce como un sistema de lazo cerrado.

Los servomotores de rotación continua desacoplan el potenciómetro del eje del motor. Esto impide que el circuito de control pueda leer la posición del eje, por lo cual provoca un movimiento continuo al no ser capaz de cumplir la condición para que el servo se detenga. Los servomotores de rotación continua normalmente pueden girar en un sentido o en otro y detenerse. Podemos modificar la velocidad de giro, pero no podremos lograr, por ejemplo, que el servo se mueva una determinada cantidad de grados y luego se detenga.
Las señales de PWM requeridas para que el circuito de control electrónico son similares para la mayoría de los modelos de servo. Esta señal tiene la forma de una onda cuadrada. Dependiendo del ancho del pulso, el motor adoptará una posición fija.

Las señales que vemos en la imagen son las que permiten que el eje del motor adquiera determinada posición. Éstas señales deben repetirse en el tiempo para que el motor mantenga una posición fija.

La duración del ciclo de trabajo varía entre 15 y 25 milisegundos. Las ondas mostradas en la imagen anterior representan ejemplos de trenes de pulsos con los que se puede mover un servomotor, utilizando un ciclo de trabajo de 20 milisegundos.
Este tren de pulsos puede ser generado por un circuito oscilador (como un 555) o por un microcontrolador. Es decir, con Arduino podemos controlar fácilmente un servomotor. De hecho en Arduino existen las librerías para el control de servos de forma nativa. No es necesario descargarlas.
Qué es el Bluetooth
El Bluetooth es un estándar de conectividad inalámbrica presente en nuestros dispositivos electrónicos del día a día. Se trata de un estándar inalámbrico que pretende permitir la transmisión de datos entre dispositivos a corto alcance, facilitando las comunicaciones entre ambos, eliminando la presencia de cables o conectores o permitiendo una interacción sencilla y rápida entre los aparatos.
Desde sus inicios hasta hoy, hay muchas versiones de Bluetooth que han ido mejorando desde hace casi veinte años. La versión más reciente es la de Bluetooth 5.0 aunque concretamente ya está disponible el modelo Bluetooth 5.2 con todo tipo de mejoras frente a los anteriores, que ya incluían mayor velocidad de conexión, menor consumo o un mayor alcance entre los dispositivos conectados

El Bluetooth es un estándar de conectividad inalámbrica presente en nuestros dispositivos electrónicos del día a día. Se trata de un estándar inalámbrico que pretende permitir la transmisión de datos entre dispositivos a corto alcance, facilitando las comunicaciones entre ambos, eliminando la presencia de cables o conectores o permitiendo una interacción sencilla y rápida entre los aparatos.
Desde sus inicios hasta hoy, hay muchas versiones de Bluetooth que han ido mejorando desde hace casi veinte años. La versión más reciente es la de Bluetooth 5.0 aunque concretamente ya está disponible el modelo Bluetooth 5.2 con todo tipo de mejoras frente a los anteriores, que ya incluían mayor velocidad de conexión, menor consumo o un mayor alcance entre los dispositivos conectados

Protocolos Bluetooth
Para poder realizar una conexión correcta entre dispositivos, hace falta que existan unos protocolos que hacen posible que tú puedas enviar música a tus auriculares inalámbricos o que puedas enviar fotografías de un teléfono a una tablet.
- ACL (Asyncrhronus Connection-Less) o Enlace sin conexión asíncrono. Se trata de un enlace de control de datos.
- SCO (Syncrhonus Connection-Oriented) o Enlace orientado a la conexión síncrono. Es un enlace de datos de voz.
- LMP (Link Management Protocol) o Protocolo de control de enlace. Se usa para establecer y controlar el enlace de radio entre dos dispositivos.
- HCI (Host Controller Interface) o Interfaz del controlador de la máquina. Permite la comunicación entre un host y un controlador a través de un inferfaz.
- LE LL (Low Energy Link Layer) o Baja energía en la capa de enlace. Responsable de procesos de control tales como el cambio de parámetros de conexión o la encriptación.
- L2CAP (Logical link control and adaptation protocol) o Protocolo de control y adaptación del enlace lógico. Se utiliza para para paquetes a las capas superiores, segmentar, reensamblar y multiplexar paquetes y establecer una buena gestión para la transmisión a otros dispositivos bluetooth.
- BNEP (Bluetooth network encapsulation protocol) o Protocolo de encapsulamiento de red bluetooth. Utilizado para transportar, de manera inalámbrica, paquetes de control y de datos.
- RFCOMM (Radio frequency communication) o Comunicación por radio frecuencia. Es un conjunto de protocolos de transporte construido sobre el protocolo L2CAP visto anteriormente.
- SDP (Service discovery protocol) o Protocolo de descubrimiento de servicios. Permite a los dispositivos descubrir qué servicios soporta el otro y en qué parámetros para conectarse a él.
- TCS (Telephony control protocol) o Protocolo de control telefónico. Controla los datos de voz y llamadas entre dos dispositivos Bluetooth.
- AVCTP (Audio/video control transport protocol) o Protocolo de control del transporte de audio y vídeo. Transfiere comandos de audio y vídeo de un control remoto al dispositivo sobre un canal L2CAP.
- AVDTP (Audio/video data transport protocol) o Protocolo de transporte de datos de audio y vídeo. Se usa para reproducir audio en unos auriculares desde el dispositivo.
- OBEX (Object Exchange) o Protocolo de intercambio de datos. Facilita el intercambio de objetos binarios entre dispositivos.
- ATT (Low Energy Attribute Protocol) o Protocolo de baja energía en atributos. Basado en atributos presentados por dispositivo, permite el intercambio de información.
- SMP (Low Energy Security Manager Protocol) o Protocolo de manejo de la seguridad. Proporciona un marco de referencia para generar y distribuir claves de seguridad entre los dispositivos.
Para poder realizar una conexión correcta entre dispositivos, hace falta que existan unos protocolos que hacen posible que tú puedas enviar música a tus auriculares inalámbricos o que puedas enviar fotografías de un teléfono a una tablet.
- ACL (Asyncrhronus Connection-Less) o Enlace sin conexión asíncrono. Se trata de un enlace de control de datos.
- SCO (Syncrhonus Connection-Oriented) o Enlace orientado a la conexión síncrono. Es un enlace de datos de voz.
- LMP (Link Management Protocol) o Protocolo de control de enlace. Se usa para establecer y controlar el enlace de radio entre dos dispositivos.
- HCI (Host Controller Interface) o Interfaz del controlador de la máquina. Permite la comunicación entre un host y un controlador a través de un inferfaz.
- LE LL (Low Energy Link Layer) o Baja energía en la capa de enlace. Responsable de procesos de control tales como el cambio de parámetros de conexión o la encriptación.
- L2CAP (Logical link control and adaptation protocol) o Protocolo de control y adaptación del enlace lógico. Se utiliza para para paquetes a las capas superiores, segmentar, reensamblar y multiplexar paquetes y establecer una buena gestión para la transmisión a otros dispositivos bluetooth.
- BNEP (Bluetooth network encapsulation protocol) o Protocolo de encapsulamiento de red bluetooth. Utilizado para transportar, de manera inalámbrica, paquetes de control y de datos.
- RFCOMM (Radio frequency communication) o Comunicación por radio frecuencia. Es un conjunto de protocolos de transporte construido sobre el protocolo L2CAP visto anteriormente.
- SDP (Service discovery protocol) o Protocolo de descubrimiento de servicios. Permite a los dispositivos descubrir qué servicios soporta el otro y en qué parámetros para conectarse a él.
- TCS (Telephony control protocol) o Protocolo de control telefónico. Controla los datos de voz y llamadas entre dos dispositivos Bluetooth.
- AVCTP (Audio/video control transport protocol) o Protocolo de control del transporte de audio y vídeo. Transfiere comandos de audio y vídeo de un control remoto al dispositivo sobre un canal L2CAP.
- AVDTP (Audio/video data transport protocol) o Protocolo de transporte de datos de audio y vídeo. Se usa para reproducir audio en unos auriculares desde el dispositivo.
- OBEX (Object Exchange) o Protocolo de intercambio de datos. Facilita el intercambio de objetos binarios entre dispositivos.
- ATT (Low Energy Attribute Protocol) o Protocolo de baja energía en atributos. Basado en atributos presentados por dispositivo, permite el intercambio de información.
- SMP (Low Energy Security Manager Protocol) o Protocolo de manejo de la seguridad. Proporciona un marco de referencia para generar y distribuir claves de seguridad entre los dispositivos.
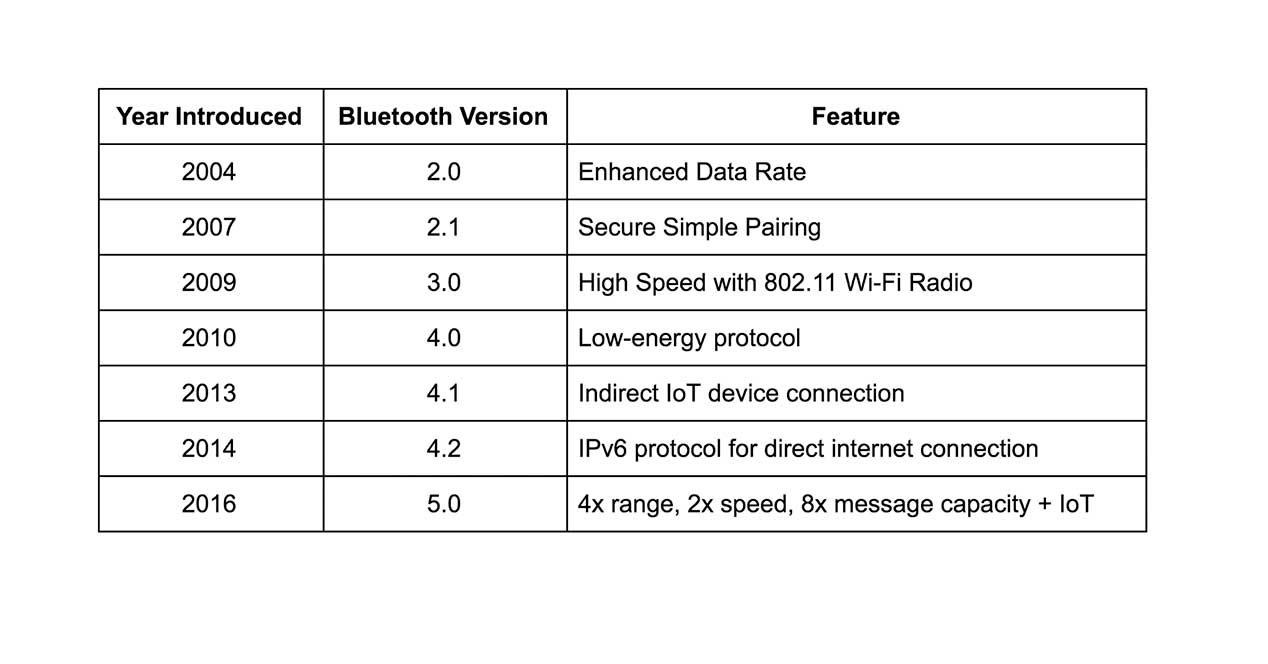
Tipos o evoluciones
Desde que la primera versión se lanzó en 1999 hasta hoy, hay muchas evoluciones de esta tecnología inalámbrica que nos ha permitido solucionar problemas de conexión, mejorar la velocidad de transmisión de datos o mejorar el alcance, por ejemplo. Aunque actualmente la versión publicada más reciente es Bluetooth 5.2, es Bluetooth 5.0 o Bluetooth 5.1 por la que apuestan la mayoría de aparatos más modernos del mercado, como algunos teléfonos móviles de última generación.
Desde que la primera versión se lanzó en 1999 hasta hoy, hay muchas evoluciones de esta tecnología inalámbrica que nos ha permitido solucionar problemas de conexión, mejorar la velocidad de transmisión de datos o mejorar el alcance, por ejemplo. Aunque actualmente la versión publicada más reciente es Bluetooth 5.2, es Bluetooth 5.0 o Bluetooth 5.1 por la que apuestan la mayoría de aparatos más modernos del mercado, como algunos teléfonos móviles de última generación.
Bluetooth 1.0
Fue la primera versión, lanzada en 1999, usada para la transmisión de datos. Se tuvo que enfrentar a muchos problemas de seguridad, tanto la primera versión, 1.0a como la segunda 1.0b, hasta que con el lanzamiento de Bluetooth 1.1, en febrero de 2001, apareció como producto más finalizado y listo para su comercialización, con una tasa de transmisión de 732.2 kb/s. La versión 1.2 redujo las interferencias.
Fue la primera versión, lanzada en 1999, usada para la transmisión de datos. Se tuvo que enfrentar a muchos problemas de seguridad, tanto la primera versión, 1.0a como la segunda 1.0b, hasta que con el lanzamiento de Bluetooth 1.1, en febrero de 2001, apareció como producto más finalizado y listo para su comercialización, con una tasa de transmisión de 732.2 kb/s. La versión 1.2 redujo las interferencias.
Bluetooth 2.0
Con una tasa de transmisión de más de 2 Mb/s, la versión 2.0 se lanzó en noviembre de 2004 con una tecnología ya consolidada. Una evolución que, tres años después, en 2007, tuvo aún más mejoras con la llegada de Bluetooth 2.1, una versión que mantuvo la tasa de transmisión al mismo nivel pero que trajo consigo una mejora importante en cuanto a conexión. Se permitió desde entonces que un dispositivo pudiera detectar y conectar automáticamente, sin PIN, a otro dispositivo con Bluetooth.
Con una tasa de transmisión de más de 2 Mb/s, la versión 2.0 se lanzó en noviembre de 2004 con una tecnología ya consolidada. Una evolución que, tres años después, en 2007, tuvo aún más mejoras con la llegada de Bluetooth 2.1, una versión que mantuvo la tasa de transmisión al mismo nivel pero que trajo consigo una mejora importante en cuanto a conexión. Se permitió desde entonces que un dispositivo pudiera detectar y conectar automáticamente, sin PIN, a otro dispositivo con Bluetooth.
Bluetooth 3.0
Su vida fue efímera, apenas de unos meses, pero con un salto muy importante al incorporar un canal de alta velocidad (High Speed), basado en Wi-Fi y en la ultra banda ancha. Su tasa de transferencia es de 24 Mb/s, haciendo esta versión perfecta para el intercambio de volúmenes con más datos, como los correspondientes al audio y al vídeo.
Su vida fue efímera, apenas de unos meses, pero con un salto muy importante al incorporar un canal de alta velocidad (High Speed), basado en Wi-Fi y en la ultra banda ancha. Su tasa de transferencia es de 24 Mb/s, haciendo esta versión perfecta para el intercambio de volúmenes con más datos, como los correspondientes al audio y al vídeo.
Bluetooth 4.0
La versión 4.0 de Bluetooth se lanzó en 2010 y con un objetivo principal: reducir los efectos en el consumo de la batería de los dispositivos. Con la 4.0 llega Bluetooth Low Energy. Gracias a esta nueva versión, la tecnología empezó a utilizarse en aparatos más pequeños o menos potentes como pulseras de actividad, por ejemplo. La tasa de transferencia se mantuvo en los 24 Mb/s. También llegó el Bluetooth 4.1, una versión mejorada que nos permitía conexión entre dispositivos pequeños sin intermediarios y que incluía el protocolo IPv6, y la versión 4.2, que hasta la llegada del 5.0 fue la tecnología más avanzada y la que trabajaba a mayor velocidad.
La versión 4.0 de Bluetooth se lanzó en 2010 y con un objetivo principal: reducir los efectos en el consumo de la batería de los dispositivos. Con la 4.0 llega Bluetooth Low Energy. Gracias a esta nueva versión, la tecnología empezó a utilizarse en aparatos más pequeños o menos potentes como pulseras de actividad, por ejemplo. La tasa de transferencia se mantuvo en los 24 Mb/s. También llegó el Bluetooth 4.1, una versión mejorada que nos permitía conexión entre dispositivos pequeños sin intermediarios y que incluía el protocolo IPv6, y la versión 4.2, que hasta la llegada del 5.0 fue la tecnología más avanzada y la que trabajaba a mayor velocidad.
Bluetooth 5.0
El Bluetooth 5.0 llegó a finales de 2016 y se lanzó enfocado principalmente al IoT y cómo todo lo que nos rodea es inteligente. Con respecto a versiones anteriores, el Bluetooth 5.0 puede alcanzar el doble de velocidad que la versión anterior y tiene un ancho de banda ocho veces mayor. Es decir, podemos enviar archivos más grandes el doble de rápido que con las versiones anteriores. Eso sí, el consumo se mantiene y sigue siendo bajo el gasto de energía que supone su utilización.
Además, otra de las ventajas más interesantes es que podemos obtener posicionamiento en lugares cerrados en los que no llega la cobertura GPS así que nos posicionará correctamente si estamos en un museo, por ejemplo, si estamos en un centro comercial o en cualquier gran superficie interior similar. Otra de las mejoras es el alcance. Que mejora el rango de señal cuatro veces con respecto a los modelos anteriores, lo que quiere decir que podremos alejarnos mucho más del aparato que queremos conectar y podría llegar hasta 200 metros en exterior.
Los dispositivos con Bluetooth 5.0 ya son la mayoría de teléfonos móviles o tablets lanzadas en el año 2019 y esta versión cuenta con la particularidad de que puede transmitir audio a dos dispositivos diferentes. Por ejemplo, a dos altavoces diferentes o un altavoz inalámbrico y unos auriculares, etc.
El Bluetooth 5.0 llegó a finales de 2016 y se lanzó enfocado principalmente al IoT y cómo todo lo que nos rodea es inteligente. Con respecto a versiones anteriores, el Bluetooth 5.0 puede alcanzar el doble de velocidad que la versión anterior y tiene un ancho de banda ocho veces mayor. Es decir, podemos enviar archivos más grandes el doble de rápido que con las versiones anteriores. Eso sí, el consumo se mantiene y sigue siendo bajo el gasto de energía que supone su utilización.
Además, otra de las ventajas más interesantes es que podemos obtener posicionamiento en lugares cerrados en los que no llega la cobertura GPS así que nos posicionará correctamente si estamos en un museo, por ejemplo, si estamos en un centro comercial o en cualquier gran superficie interior similar. Otra de las mejoras es el alcance. Que mejora el rango de señal cuatro veces con respecto a los modelos anteriores, lo que quiere decir que podremos alejarnos mucho más del aparato que queremos conectar y podría llegar hasta 200 metros en exterior.
Los dispositivos con Bluetooth 5.0 ya son la mayoría de teléfonos móviles o tablets lanzadas en el año 2019 y esta versión cuenta con la particularidad de que puede transmitir audio a dos dispositivos diferentes. Por ejemplo, a dos altavoces diferentes o un altavoz inalámbrico y unos auriculares, etc.
Bluetooth 5.1 y Bluetooth 5.2
Las últimas novedades en el mundo Bluetooth han sido dos actualizaciones de la versión 5.0. La 5.1, presentada en enero de 2019, y la 5.2 recientemente publicada a principios de este 2020. La versión 5.1 trajo mejoras en la velocidad de conexión y en la reducción del consumo, además de novedades como la detección y ubicación de otros dispositivos conectados, parecida a la ubicación GPS. La 5.2, de la cual ya se han anunciado los primeros chips compatibles, trae consigo tres novedades importantes. El Enhanced Attribute Protocol (EATT), una mejora del ATT; el LE Power Control, para optimizar de forma dinámica la potencia de transmisión que se usa entre los dispositivos conectados; y los LE Isochronous Channels, unos canales diseñados para LE Audio, otra de las novedades de este estándar y que permite a un dispositivo, por ejemplo un smartphone, mandar audio a varios dispositivos a la vez.
01-4-2020
¿QUÉ ES UN ACELERÓMETRO?
Recordamos brevemente que la aceleración es la variación de la velocidad respecto del tiempo, expresado matemáticamente.

Las unidades para la aceleración en el sistema internacional son m/s^2.
Asimismo, recordamos que por la primera ley de Newton

Es decir, que cualquier cuerpo con una masa m requiere una cierta fuerza para variar su velocidad. Equivalentemente, cualquier cuerpo sometido a una aceleración experimentará una cierta fuerza. Emplearemos este hecho para entender el funcionamiento del acelerómetro.
Imaginemos que queremos fabricar un dispositivo que quiera medir aceleración. Podríamos construir un sensor formado por un cuerpo sólido, en cuyo interior suspendemos una masa sujeta por muelles al cuerpo exterior.

Al aplicar una aceleración al conjunto la masa suspendida ejercerá una fuerza sobre los muelles causando que uno se contraiga y otro se elongue, por lo que la posición relativa de la masa dentro del sensor variará.

Al someter el dispositivo a aceleraciones la parte interior se deforma y se desplaza respecto a la parte fija, de deforma de forma similar a nuestro dispositivo imaginario basado en muelles. El desplazamiento es detectado por la variación de la capacitancia del sistema.
 De forma similar, en el caso 3D las ecuaciones resultan,
De forma similar, en el caso 3D las ecuaciones resultan,



Sin embargo un acelerómetro no resulta un sensor adecuado para intentar determinar la velocidad de un sistema y mucho menos su posición. Podríamos estar tentados a estimar la velocidad, simplemente multiplicando la aceleración por el tiempo.
- Mecánicos
- Capacitivos
- Piezo eléctricos
- Piezo resistivos
- Térmicos
Acelerómetro mecánico

Acelerómetro capacitivo

Acelerómetro piezoeléctrico

Acelerómetro piezoresistivo

Acelerómetro térmico

Las últimas novedades en el mundo Bluetooth han sido dos actualizaciones de la versión 5.0. La 5.1, presentada en enero de 2019, y la 5.2 recientemente publicada a principios de este 2020. La versión 5.1 trajo mejoras en la velocidad de conexión y en la reducción del consumo, además de novedades como la detección y ubicación de otros dispositivos conectados, parecida a la ubicación GPS. La 5.2, de la cual ya se han anunciado los primeros chips compatibles, trae consigo tres novedades importantes. El Enhanced Attribute Protocol (EATT), una mejora del ATT; el LE Power Control, para optimizar de forma dinámica la potencia de transmisión que se usa entre los dispositivos conectados; y los LE Isochronous Channels, unos canales diseñados para LE Audio, otra de las novedades de este estándar y que permite a un dispositivo, por ejemplo un smartphone, mandar audio a varios dispositivos a la vez.
01-4-2020
¿QUÉ ES UN ACELERÓMETRO?
Como su nombre indica, un acelerómetro es un dispositivo que permite medir la aceleración a la que está sometido.
Recordamos brevemente que la aceleración es la variación de la velocidad respecto del tiempo, expresado matemáticamente.
Las unidades para la aceleración en el sistema internacional son m/s^2.
Asimismo, recordamos que por la primera ley de Newton
Es decir, que cualquier cuerpo con una masa m requiere una cierta fuerza para variar su velocidad. Equivalentemente, cualquier cuerpo sometido a una aceleración experimentará una cierta fuerza. Emplearemos este hecho para entender el funcionamiento del acelerómetro.
Imaginemos que queremos fabricar un dispositivo que quiera medir aceleración. Podríamos construir un sensor formado por un cuerpo sólido, en cuyo interior suspendemos una masa sujeta por muelles al cuerpo exterior.

Al aplicar una aceleración al conjunto la masa suspendida ejercerá una fuerza sobre los muelles causando que uno se contraiga y otro se elongue, por lo que la posición relativa de la masa dentro del sensor variará.
Este desplazamiento de la masa libre interior puede ser medido para determinar la magnitud de la aceleración. El desplazamiento será proporcional a la aceleración soportada, y se mantendrá constante mientras la aceleración sea constante.
Para construir este acelerómetro en un MEMS se emplea una estructura micromecanizada de polisilicio construida sobre una oblea de silicio. Los muelles de polisilicio suspenden la estructura sobre la oblea de silicio, a la vez que proporciona resistencia para soportar las aceleraciones a las que se verá sometido el sensor.

Al someter el dispositivo a aceleraciones la parte interior se deforma y se desplaza respecto a la parte fija, de deforma de forma similar a nuestro dispositivo imaginario basado en muelles. El desplazamiento es detectado por la variación de la capacitancia del sistema.
Los acelerómetros disponibles normalmente son de 3 ejes, es decir, son capaces de medir la aceleración a la que está sometido el sensor en X, Y y Z independientemente, lo que permite saber simultáneamente la magnitud y dirección de la aceleración medida.
La capacidad de medir medir la aceleración de un sistema proporciona en si misma funcionalidades interesantes, como registrar vibraciones o golpes. Por ejemplo, los podómetros emplean un acelerómetro para detectar los pasos que damos.
Pero no es la única función que podemos obtener de un acelerómetro. El sensor se ve afectado por la gravedad terrestre, que supone una aceleración de aproximadamente 9.81 m/s^2 en la superficie de la tierra, que por supuesto es registrada constantemente por el sensor.
Una primera consecuencia es que podemos detectar condiciones de caída libre, por ejemplo, cuando en sensor cae de una mesa, o un robot pierde el equilibrio y cae al suelo. Simplemente debemos comprobar que la aceleración resultante medida es inferior a 9.81 m/s^2.
Incluso más interesante la medición de la gravedad puede emplearse para determinar la orientación del sensor. Dado que podemos registrar la aceleración en tres ejes, en ausencia de otras aceleraciones, podemos determinar la orientación del sensor con un poco de trigonometría.
En el caso de 2D, asumiendo que ponemos el sensor horizontal en su plano X-Y, con Z apuntando hacía arriba, y únicamente giramos en el eje Y, la ecuación para el ángulo resulta,

De forma similar, en el caso 3D las ecuaciones resultan,

Sin embargo un acelerómetro no resulta un sensor adecuado para intentar determinar la velocidad de un sistema y mucho menos su posición. Podríamos estar tentados a estimar la velocidad, simplemente multiplicando la aceleración por el tiempo.
Como frecuentemente comentamos, este tipo de mediciones integradas respecto al tiempo acumulan los errores de medición y el ruido, lo que conlleva efectos de deriva. Debería ser siempre el último recurso y nunca tenerlo en consideración más allá de una estimación burda.
Como vemos, un acelerómetro es un dispositivo muy versátil, que no permite obtener mediciones de aceleraciones y orientación. Además son sensores absolutos es decir, que existe un punto 0,0,0 de medición, que correspondería con el sensor cayendo libremente en el vacío. Finalmente, la medición no es integrada, por lo que no presentan deriva en la medición a medio o largo plazo.
Como aspectos negativos, son dispositivos muy sensibles a las vibraciones, por lo que la medición presentará ruido de alta frecuencia. En general, deberemos filtrar la señal antes de poderla usar. En el caso más simple, simplemente hacer el promedio de varias mediciones será suficiente.
Tipos de acelerómetros
Existen diversos tipos y diseños que aunque todos tienen el mismo fin pueden ser muy distintos unos de otros según la aplicación a la cual van destinados y las condiciones en las que han de trabajar.
- Mecánicos
- Capacitivos
- Piezo eléctricos
- Piezo resistivos
- Térmicos
Acelerómetro mecánico
Emplean una masa inerte (medida de resistencia de una masa al cambio de velocidad) y resortes elásticos. Los cambios se miden con galgas extensiométricas, incluyendo sistemas de amortiguación que evitan la propia oscilación.
En este tipo de acelerómetro, utiliza una o más galgas extensométricas que hacen de puente entre la carcasa del instrumento y la masa inercial, la aceleración produce una deformación de la galga que se traduce en una variación en la corriente detectada por un puente de Whetstone, la deformación es directamente proporcional a la aceleración aplicada al acelerómetro.

Acelerómetro capacitivo
Están compuestos por capas capacitivas internas, ya sea que estén fijas o contengan unos pequeños resortes, al aplicar una fuerza de aceleración sobre el sensor, las placas se mueven una a otra, esto ocasiona que la capacitancia entre ellas cambie. A partir de estos cambios en la capacitancia es con lo que se puede determinar la aceleración.

Acelerómetro piezoeléctrico
Su funcionamiento se basa en el efecto piezoeléctrico. por lo que se puede deducir su comportamiento: una deformación física del material causa un cambio en la estructura cristalina y así cambian las características eléctricas.
El funcionamiento de este tipo de acelerómetros se basa en las propiedades de los cristales piezo-eléctricos. Estos cristales cuando son sometidos a alguna fuerza producen una corriente eléctrica, a causa de la variación de su estructura cristalina.
Acelerómetro piezoresistivo
Un acelerómetro piezo-resistivo a diferencia de uno piezo-eléctrico utiliza un sustrato en vez de un cristal piezo-eléctrico, en esta tecnología las fuerzas que ejerce la masa sobre el sustrato varían su resistencia, que forma parte de un circuito que mediante un puente de Whetstone mide la intensidad de la corriente.
Acelerómetro térmico
Utilizando un sustrato de silicio en el cual se hace un hueco para meter una pequeña resistencia que hace de calentador, con dos termopares en los extremos. Con esta estructura conseguimos que se forme una cavidad de aire caliente, llamamos burbuja, sobre los termopares.
La principal característica de estos dispositivos es que tienen sólo un elemento móvil, la burbuja diminuta de aire caliente, herméticamente sellado dentro de una cavidad existente en el encapsulado del sensor. Cuando una fuerza externa como el movimiento, la inclinación, o la vibración es aplicada, la burbuja de aire caliente se mueve de una forma análoga al mismo. El cambio de estado dentro de la cavidad del integrado, produce un voltaje que es función de la diferencia de temperatura y que tras ser amplificado, condicionado, se proporciona como salida el valor de un voltaje absoluto.
Video tutorial para poder acceder a clases virtuales por medio de la platforme de Google.
Classroom.
La clave de la clase será otorgada por medio de WhatsApp o una plataforma personal.
0 Comments:
Publicar un comentario