
Creando un circuito con Pantalla LCD, Keypad y Arduino en el simulador Tinkercad.
Creando Aplicación en App Inventor 2 para controlar servomotores mediante el uso del módulo bluetooth y el Arduino.
Codigo en Arduino para controlar servomoteres con módulo bluetooth.
Tutoriales, Curso de Robotica
Puente H:
cambio de giro y velocidad de
motores DC.
El puente en H lleva su nombre gracias al aspecto físico del esquema básico de los interruptores usados para direccionar la corriente en un sentido o en el otro (figura 1), este cambio en la dirección de la corriente hace que el motor cambie el sentido del giro.

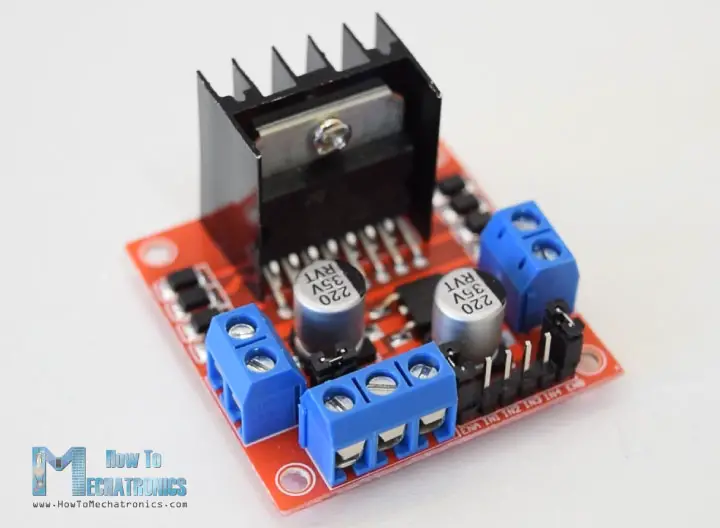
Los interruptores en las imágenes 2a y 2b pueden ser reemplazados por relés, contactores (eléctricos de potencia) o transistores, para hacer el diseño más compacto se han fabricado circuitos integrados que funcionan como puente en H con mayores configuraciones para su funcionamiento. Uno de ellos es el L298N.
Este circuito integrado soporta cargas inductivas tales como relés, motores DC, motores paso a paso y solenoides. La corriente que fluye por la carga no debe exceder los dos amperios por canal, esta corriente a su vez sale del puente a un pin de sensado, donde se debe conectar una resistencia externa para determinar la intensidad de la corriente, ésta se llama resistencia de sensado A (para el motor A, RSA) y lo mismo sería para el motor B, RSB
El circuito tiene dos puentes, el puente A (para el motor A) y el puente B (para el motor B), cada puente es controlado por tres compuertas, por ejemplo para el puente A, In1, In2 y EnA (Enable A).
El máximo voltaje de operación para los motores es de 46 voltios DC.
Las dos entradas de habilitación EnA y EnB habilitan o deshabilitan por completo el puente respectivo independientemente del estado de las señales de entrada In1 e In2 que se encargan de indicar el sentido del giro del motor, lo mismo ocurre para el puente B.
Si se quiere controlar la velocidad del motor en cualquiera de los dos puentes basta con energizar y des energizar el pin de control del puente (Enx), este voltaje promedio incrementará o disminuirá la cantidad de voltaje que le llega al motor, provocando su aceleración o desaceleración, este control se hace con los pines de PWM del Arduino.

La función analogWirte():
Esta función escribe un valor analógico en un pin (PWM), esta puede ser usada para controlar la luminosidad de un led o la velocidad de un motor
Sintaxis: analogWrite(pin, valor)
Parámetros a ingresar en la función:
pin: Es el pin en el cual se quiere generar la señal PWM..
valor: El ciclo de trabajo deseado comprendido entre 0 (siempre apagado) y 255 (siempre encendido).
Conductor L298N
El L298N es un controlador de motor doble H-Bridge que permite el control de velocidad y dirección de dos motores de CC al mismo tiempo. El módulo puede conducir motores de CC que tienen voltajes entre 5 y 35 V, con un pico de corriente de hasta 2A.
Video tutorial para programar Servomotores con Arduino y la creación de su circuito en Fritzing.
¿Qué es y cómo funciona un servomotor?

Un servomotor es un tipo especial de motor que permite controlar la posición del eje en un momento dado. Esta diseñado para moverse determinada cantidad de grados y luego mantenerse fijo en una posición.

Los motores DC como los que se muestran en la imagen tienen la particularidad de que giran sin detenerse. No son capaces de dar determinada cantidad de vueltas o detenerse en una posición fija. Solo giran y giran sin parar, hasta que se interrumpa el suministro de corriente. Esto hace que no sea posible utilizarlos para asuntos de robótica, ya que en este tipo de aplicaciones se necesita movimientos precisos y mantener posiciones fijas. Lo cierto es que este no es el único tipo de motor DC que existe.
Para la construcción de robots se utilizan motores paso a paso y/o servomotores. Estos se caracterizan por ser permitir un movimiento controlado y por entregar un mayor par de torsión (torque) que un motor DC común. Sobre este tema ya ha escrito el amigo Gustavo Circelli de forma indirecta en su post sobre el acelerómetro MMA7361. Sin embargo, he decidido escribir este post exclusivo sobre el tema. En este artículo daremos un vistazo a lo que son los servomotores, sus usos y principales características y haremos algunas pruebas experimentales sobre consumo de energía.
Definición de servomotor
Un servomotor (o servo) es un tipo especial de motor con características especiales de control de posición. Al hablar de un servomotor se hace referencia a un sistema compuesto por componentes electromecánicos y electrónicos.

El motor en el interior de un servomotor es un motor DC común y corriente. El eje del motor se acopla a una caja de engranajes similar a una transmisión. Esto se hace para potenciar el torque del motor y permitir mantener una posición fija cuando se requiera. De forma similar a un automóvil, a menor mayor velocidad, menor torque. El circuito electrónico es el encargado de manejar el movimiento y la posición del motor.

La presencia del sistema de engranajes como el que se muestra en la figura hace que cuando movemos el eje motor se sienta una inercia muy superior a la de un motor común y corriente. Observando las imágenes que hemos presentado nos podemos dar cuenta que un servo no es un motor como tal, sino un conjunto de partes (incluyendo un motor) que forman un sistema.
Tipos de servomotores
Existen servomotores para todo tipo de usos. En la industria, la robótica, en el interior de las impresoras, máquinas CNC, etc. Para los efectos de este post nos interesan los servomotores de modelismo, que son los utilizados en prototipos de robótica. No tomaremos en cuenta los servomotores del tipo industrial.

Servomotor de Tipo Industrial

Servomotor de modelismo
Los servomotores de modelismo operan a voltajes bajos en corriente directa, típicamente entre 4 y 6 voltios. Los servomotores industriales operan tanto en DC como en AC (monofásico o trifásico). Para mí es un poco difícil escribir sobre este tipo de temas debido a que nunca he tenido la oportunidad de trabajar con un servo industrial. Lo que sé sobre ellos es por lo que he leído o lo habré visto en algún video o seminario. Los servos de modelismo, en cambio, se pueden adquirir a muy bajo costo en Internet y son populares entre los usuarios de Arduino.
Se debe resaltar que, dentro de los diferentes tipos de servomotores, éstos se pueden clasificar según sus características de rotación.
- Servomotores de rango de giro limitado: son el tipo más común de servomotor. Permiten una rotación de 180 grados, por lo cual son incapaces de completar una vuelta completa.
- Servomotores de rotación continua: se caracterizan por ser capaces de girar 360 grados, es decir, una rotación completa. Su funcionamiento es similar al de un motor convencional, pero con las características propias de un servo. Esto quiere decir que podemos controlar su posición y velocidad de giro en un momento dado.
Los servomotores de rango de giro limitado se pueden adecuar para que funcionen como servomotores de rotación continua. Sin embargo, si requerimos un servo de 360 grados es mejor comprar uno que haya sido diseñado para este tipo de uso.
Funcionamiento de un servomotor
Los servomotores poseen tres cables, a diferencia de los motores comunes que sólo tienen dos. Estos tres cables casi siempre tienen los mismos colores, por lo que son fácilmente reconocibles.

Los colores dependerán del fabricante, pero difícilmente nos equivocaremos a la hora de reconocer los terminales del un servo. La necesidad de una señal de control para el funcionamiento de este tipo de motores hace que sea imposible utilizarlos sin un circuito de control adecuado. Esto se debe a que para que el circuito de control interno funcione, es necesaria una señal de control modulada. Para esto se utiliza modulación por ancho de pulsos, es decir, PWM.

El diagrama de bloque del servomotor representa de forma visual el servomotor como un sistema. El circuito electrónico es el encargado de recibir la señal PWM y traducirla en movimiento del Motor DC. El eje del motor DC está acoplado a un potenciómetro, el cual permite formar un divisor de voltaje. El voltaje en la salida del divisor varía en función de la posición del eje del motor DC.

De forma similar, cuando el eje del motor modifica la posición del potenciómetro, el voltaje en la terminal central varía. El potenciómetro permite que el circuito de control electrónico pueda retroalimentarse con la posición del motor en un momento dado. Esto, en Teoría de Control se conoce como un sistema de lazo cerrado.

Los servomotores de rotación continua desacoplan el potenciómetro del eje del motor. Esto impide que el circuito de control pueda leer la posición del eje, por lo cual provoca un movimiento continuo al no ser capaz de cumplir la condición para que el servo se detenga. Los servomotores de rotación continua normalmente pueden girar en un sentido o en otro y detenerse. Podemos modificar la velocidad de giro, pero no podremos lograr, por ejemplo, que el servo se mueva una determinada cantidad de grados y luego se detenga.
Las señales de PWM requeridas para que el circuito de control electrónico son similares para la mayoría de los modelos de servo. Esta señal tiene la forma de una onda cuadrada. Dependiendo del ancho del pulso, el motor adoptará una posición fija.

Las señales que vemos en la imagen son las que permiten que el eje del motor adquiera determinada posición. Éstas señales deben repetirse en el tiempo para que el motor mantenga una posición fija.

La duración del ciclo de trabajo varía entre 15 y 25 milisegundos. Las ondas mostradas en la imagen anterior representan ejemplos de trenes de pulsos con los que se puede mover un servomotor, utilizando un ciclo de trabajo de 20 milisegundos.
Este tren de pulsos puede ser generado por un circuito oscilador (como un 555) o por un microcontrolador. Es decir, con Arduino podemos controlar fácilmente un servomotor. De hecho en Arduino existen las librerías para el control de servos de forma nativa. No es necesario descargarlas.
Video tutorial para poder acceder a clases virtuales por medio de la platforme de Google.
Classroom.
La clave de la clase será otorgada por medio de WhatsApp o una plataforma personal.
Codigo para programar un buzzer con notas musicales.

Codigo para programar un buzzer (zumbador)

Descargar Programa de Fritzing para Windows. Servidor Medifire


Codigo para programar un buzzer (zumbador)

Descargar Programa de Fritzing para Windows. Servidor Medifire
profe el programa tira un error al abrirlo en arduino que se hace??
ResponderBorrarEstoy por subirles el codigo... buena noche
Borrarprofe el documento que subio no abre
Borrarla parte del ultrasonico en el código está mala profe
ResponderBorraratentamente, 5to Bachillerato "A"
LO UNICO QUE TIENEN QUE ELIMINAR ES UN CORCHETE QUE SE FUÉ DEMAS EN EL CODIGO AL FINAL.
BorrarProfe buenas tardes, reciba un cordial saludo de Paz y bien, el motivo del comentario es para hacerle saber de la falla sobre el código, debido a que luego de eliminar el corchete, sigue tirando error, agradeciendo su comprensión y esperando su respuesta...
ResponderBorrar1. Desconectar el pin rx y tx del modulo Bluetooth
Borrar2. deben configurar en el programa de arduino que arduino estan usando
Arduino Mega
Arduino Nano ....
2. configurar el puerto (que puerto de su computadora esta conectado el cable para enviar el codigo al arduino).